31 × 31mm
板子尺寸
4
DC 马达输出
4
GPIO / PWM 接口
6
最多同时 PWM 设备
创意点子永远不嫌多
V7RCDOM‑V2 不仅仅是为 V7RC 生态打造的专属开发板,整合控制、通讯与动力设计。你也可以单独使用 V7RCDOM‑V2 在 IoT 开发领域。不是单纯把芯片放在小板子上,而是把机器人原型开发真正需要的关键能力集中在一起。
Feature 01
快速打造各种载具
V7RCDOM‑V2 不是一般教学工程板,而是针对实际落地应用开发的核心控制板,适合小马达控制、供电与机构整合需求。
Feature 02
小尺寸,高整合
在 31mm × 31mm 的尺寸内整合驱动、通讯、供电与烧录能力,适合空间受限的机器人设计。
Feature 03
V7RC 生态整合
可作为 V7RC App、控制协议、教学内容与实际机器人作品之间的共同硬件基础。
Feature 04
高贵而不贵
亲民的价格让你更容易实现创意。
精心设计的电路布局,就是要让你方便整合
不需要焊接,只要将各种周边插上插座,轻松完成你的作品。
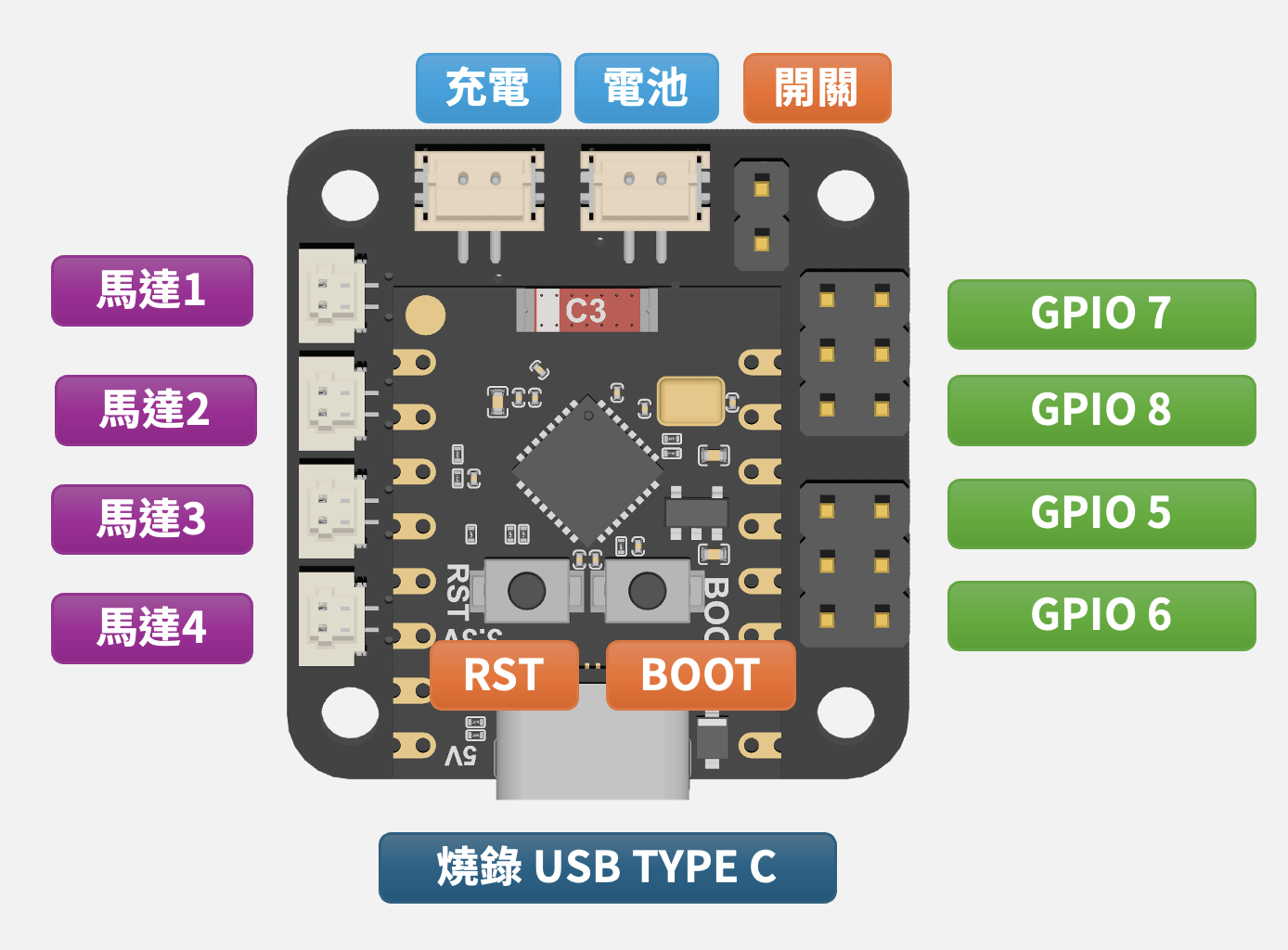
01
4 组 DC Motor 接口,直接对应载具控制需求
满足绝大部分载具的需求,4 颗 DC 马达的控制超方便。
02
充电、电池与电源开关整合在一起
不只是电池,还具有充电与电源开关的功能。只要一颗 18650 电池就可以开启电源。
03
USB Type-C 烧录,实作流程更直接
在教学现场与快速原型验证中,烧录流程越单纯,越容易被真正导入,而不是停留在展示。
开发韧体前先了解 GPIO 的应用
如果你要开发自己的应用,先查询 GPIO 对应到哪些插座。
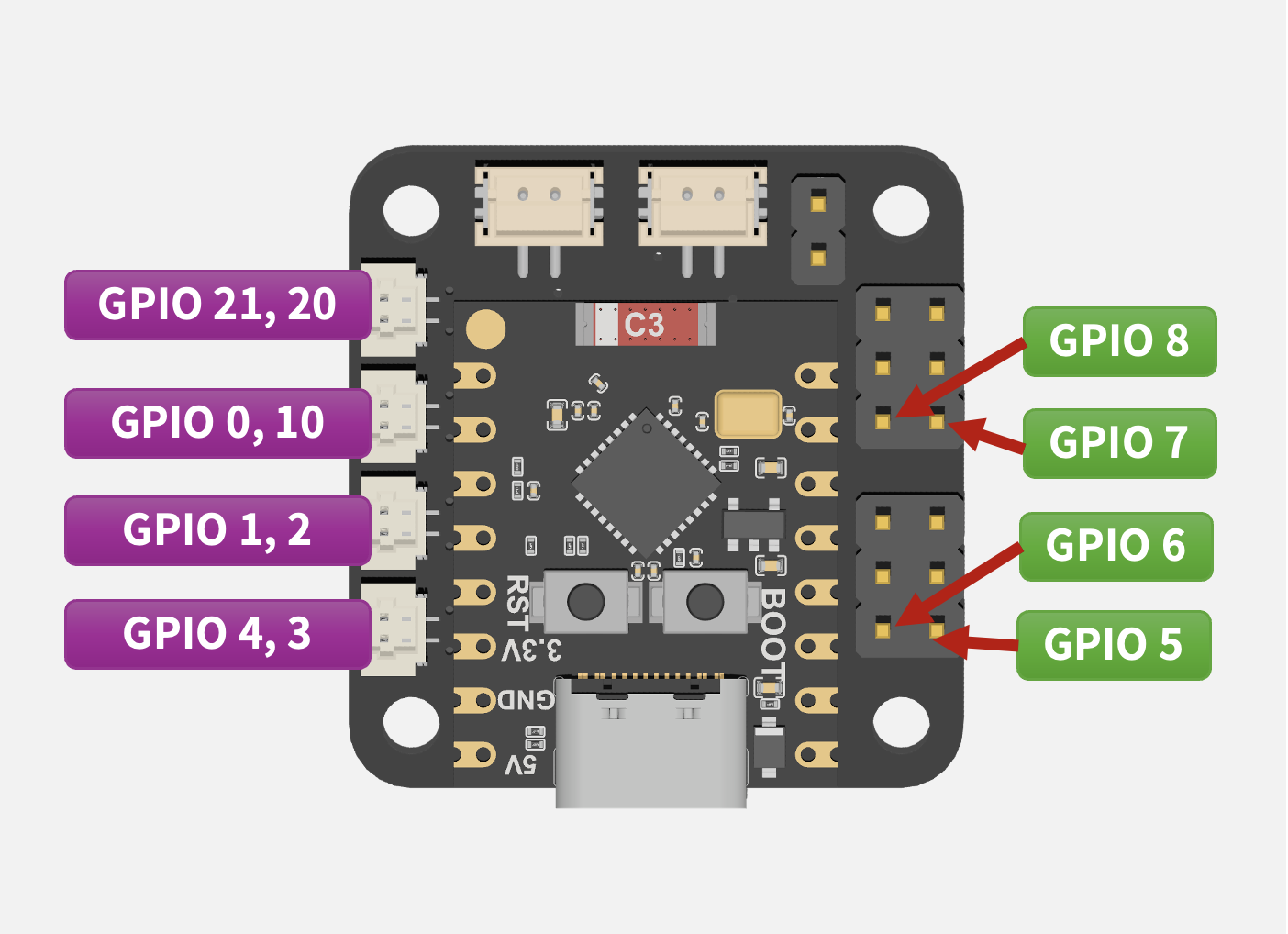
01
Motor 1~4 对应 GPIO 21/20、0/10、1/2、4/3
把驱动输出逻辑写清楚,网站就不需要再用一堆含糊的 marketing 句子填空。
02
右侧 4 组 PWM / GPIO,适合 Servo 与周边控制
这一区直接对应实际可接设备,而不是仅仅列出 GPIO 数字。
03
GND / VCC / GPIO 排列降低接线错误
把接线方向说清楚,是提升产品体验与降低支持成本最直接的方法之一。
麻雀虽小、五脏俱全、整合度更高
比较区的任务不是夸大自己,而是清楚说明这块板子相较于一般分离式控制板组合,能省下多少模组与整合成本。
不只可以开发,还要能快速交付成果
针对你的开发或想法,请参考我们的文件加速完成作品。
Environment
Arduino IDE
适合教学、原型验证与 V7RC 机器人控制流程整合。
Environment
MicroPython
适合教学、原型验证与 V7RC 机器人控制流程整合。
Environment
ESP32 开发工具
适合教学、原型验证与 V7RC 机器人控制流程整合。
从教育示范走向实际载具平台
这块板子的价值,不是停留在规格表,而是在它能够承载什么作品。应用场景应该被直接前置。
Spec Snapshot